PWM怎么控制舵机?

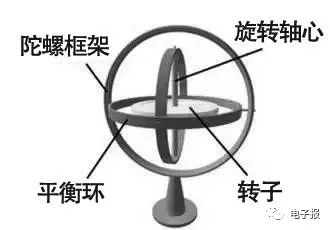
首先来了解什么是舵机,这是一种位置或者伺服驱动器,经常应用去需要位置或角度转移的场合,比如航模、遥控器机器人等,它的主要核心部件是外壳部件、驱动电路板、马达、位置检测器等,马达是驱动负载,可以用驱动电路板用PWM信号驱动,,如下图是某机器人舵机,这种属于小型的,工作电压6--7.2V,而工作电流只有100mA,角度转移180°,它有三根线:棕色线、红色线、橙色线,分别是电源地GND、电源正极、信号线Signal。


舵机控制
舵机的转动其实是内部马达,比如有些是直流无刷电机,那么驱动它只需要给它一个PWM信号,这是一种脉冲宽度调制信号,舵机的控制一般需要有一个一定周期的左右时基脉冲,并定义改脉冲的高低电平占空比,同时每个占空比对应一个角度,这样如果需要调节某个角度只需芯片输出一个对应关系角度的PWM值,需要注意的是,一般驱动PWM信号需要专门的PWM输出口,但是如果没有现成的也可以编写程序设置定时、中断等,但是这样不够精准,建议还是用专门的驱动IC。